
















 27 / 118
27 / 118

27
rmo
giugno/luglio 2016
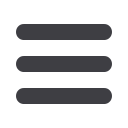
Una pianta sembra una scelta bizzarra per fare da modello
a un robot…
“In effetti quando si pensa a un robot vengono in mente il
movimento, le capacità sensoriali, la capacità di svolgere com-
piti complessi, caratteristiche chenormalmentenonassociamo
allepiante. In realtà lepiante simuovono, anche senellamag-
gior parte dei casi a velocità che non riusciamo a percepire se
non in filmati accelerati, e lo fanno crescendo, cioè con una
modalità diversa da quella degli animali. Hanno elevate capa-
cità sensoriali, e una capacità molto sviluppata di comunicare
tra loro, caratteristiche ideali per un robot. Il fatto è che non
conosciamo le piante bene quantogli animali, che sonopiù si-
mili a noi. È risultata una sorpresa scoprire che anche le piante
potevano insegnare qualcosa di utile”.
Nel suo campo lo studio degli esseri viventi e quello dei
robot procedono di pari passo?
“Certo, se si vuole fare innovazione bisogna partire innanzi-
tutto dalla comprensione di come funziona l’elemento bio-
logico. Ovviamente è un percorso lungo e difficile, perché
in molti casi le domande che si pongono gli ingegneri sono
diverse da quelle che si pongono i biologi, per cui si devono
fare ricerche apposite. Solo una volta compresi questi aspetti
si passa allaparte tecnologica, chenon vuole essereuna copia,
ma implementa quei principi in modo artificiale. I due studi
vanno effettivamente di pari passo, e talvolta è il robot a
essere usato come piattaforma per capire come funziona la
pianta. Per esempio, uno dei meccanismi che studiamo è la
crescita delle radici, che avviene aggiungendo nuove cellule
sullapunta, l’unicaparte che in realtà simuove,mentre il resto
è fermo rispetto al suolo. Così si riducono attrito e pressione,
e la radice può procedere anche per chilometri. Una volta
compreso questo meccanismo lo abbiamo implementato nel
nostro robot, che è ingradodi crescere, aggiungendonon cel-
lule, mamateriale artificiale, al suo apice”.
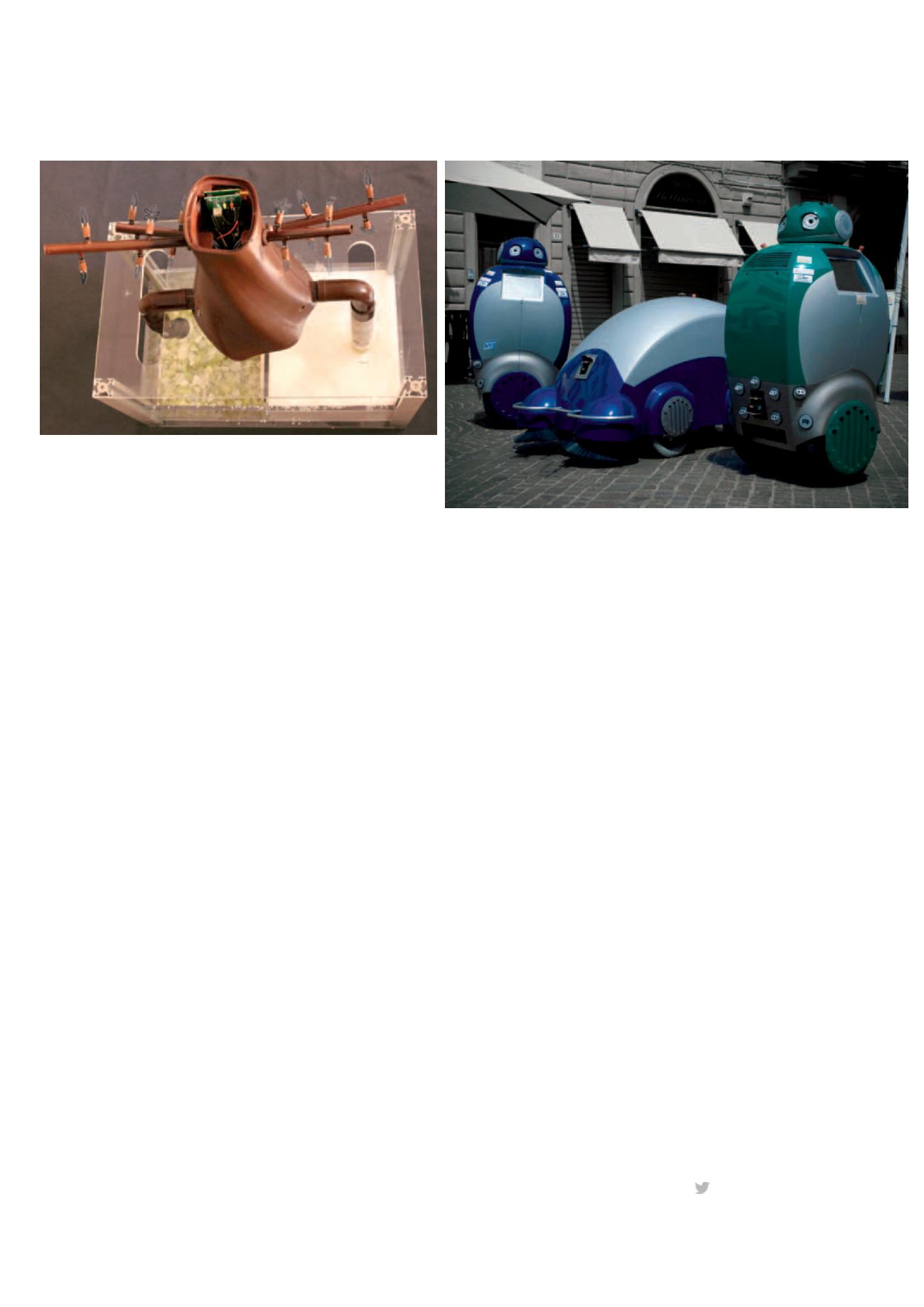
Lei si è occupata anche di Dustbot, il robot spazzino…
“Sì, Dustbot è un progetto europeo di cui mi sono occupata
quando ancora facevo la ricercatrice alla Scuola S. Anna.
Dustbot era un robot di servizio per migliorare la qualità
dell’igiene urbana. Era stato ideato per raccogliere i rifiuti dif-
ferenziati nelle aree a traffico limitato, dove i classici mezzi di
raccolta non possono arrivare. Veniva chiamato dai cittadini
tramite cellulare, previa registrazione, ed era in grado di ar-
rivare direttamente a casa. Si poteva selezionare il tipo di ri-
fiuto, e il robot apriva la pancia per raccoglierlo. Poteva anche
fornire a richiesta informazioni sulla qualità dell’aria, essendo
dotato di sensori. Oggi l’attenzione si è spostata su robot che
nonhannobisognodi stradepermuoversi,ma sanno spostarsi
in campo aperto, per esempio per portare soccorsi dopo un
disastro”.
Lei ha lavorato in due istituti che sono le ‘star’ della robo-
tica. Cos’hanno di speciale?
“Soprattutto la professionalità e preparazione delle persone
che ci lavorano. Ma c’è anche un’attenzione particolare alla
meritocrazia, che è la spinta fondamentale perché ci sia un
valore aggiunto nella ricerca. Questi due ambienti hanno
una particolare attenzione nel portare avanti persone con
qualità professionali di alto livello. Inoltre l’IIT ha di recente
lanciato la ‘tenure track’, unmodello internazionale per sele-
zionare ricercatori che, se superano una serie di selezioni nel
tempo, diventano a tempo indeterminato. Perché si possano
attirare stranieri, o anche italiani che lavorano all’estero ma
hanno voglia di rientrare, è importante la qualità scientifica,
ma anche la strategiamessa in atto per attirare le persone. Si
parla spesso di fuga dei ricercatori italiani, ma non è questo
il vero problema, bensì riuscire ad attirare persone in modo
che al flusso in uscita corrisponda un flusso in entrata di pari
qualità”.
@Vanamonde65
Un esempio di robotica bioispirata: riprende i modelli biologici
delle piante. Dustbot è un robot di servizio per migliorare la
qualità dell’igiene urbana.