

















 65 / 104
65 / 104

65
rmo
maggio 2017
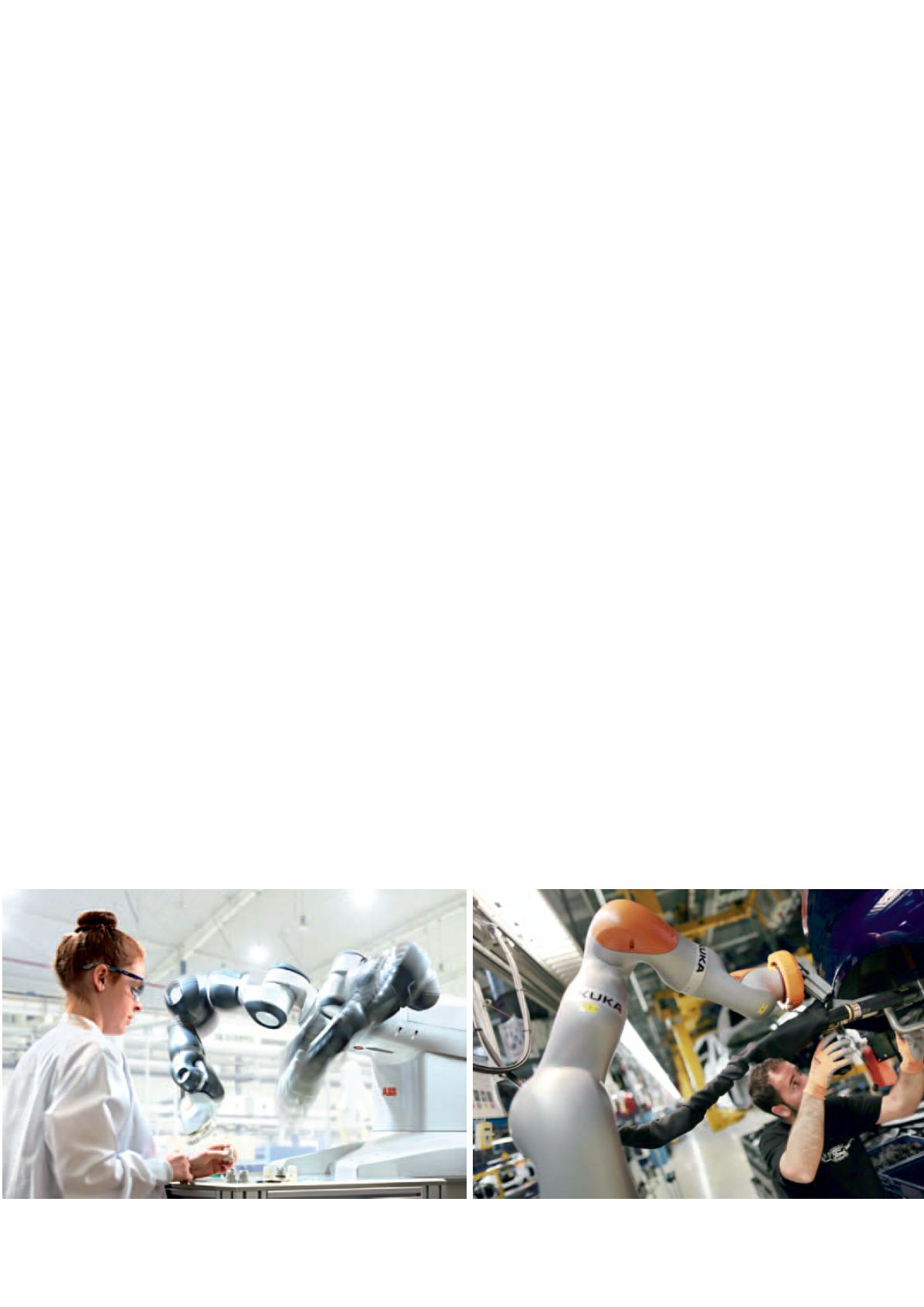
novre mostrate dal ‘collega’ umano o imparando dai
propri errori e dall’esperienza. L’obiettivo è fare in
modo che l’operatore funga da supervisore, senza
dover seguire il robot in ogni movimento. Quasi
sempre svolge lavori ripetitivi e usuranti o attività
di bassa manovalanza che possono essere dannose o
pericolose per la persona. La convivenza tra operai e
cobot è resa possibile dal fatto che i robot collabora-
tivi sono dotati di sofisticati meccanismi di sicurezza,
basati sul controllo della forza e sul costante monito-
raggio di quanto avviene intorno a loro. Attraverso
telecamere, sensori, algoritimi stocastici e speciali
sistemi di anticollisione, infatti, coordinano i propri
movimenti con quelli dei lavoratori umani scongiu-
rando la possibilità di incidenti.
Pur registrando alcune perplessità (condizioni di sicu-
rezza, limiti normativi, gestione delle responsabilità,
procedure di progettazione), il mercato ne sta ricono-
scendo le potenzialità. Un ulteriore fattore di successo
è rappresentato dall’usabilità del sistema robotizzato
collaborativo: comfort di utilizzo, percezione della
sicurezza e impostazioni orientate all’ergonomia. A
questo si affianca la crescente necessità da parte delle
aziende di avere a disposizione postazioni di lavoro
‘intelligenti’ in grado di adattarsi rapidamente alla
tipologia di operatore, di lavorazione e di prodotto.
Applicazioni, Startup, Progetti speciali.
La robo-
tica collaborativa può essere virtualmente introdotta
in ogni processo di lavorazione.
Nell’automotive, ad esempio, dopo la Ford, attiva-
tasi a Colonia con i primi esemplari, anche il Gruppo
Volkswagen e BMW stanno implementando pro-
grammi di introduzione dei cobot nei propri stabili-
e pesanti robot industriali, ma si affermeranno nei
settori del manifatturiero in cui le tradizionali solu-
zioni robotizzate non sono competitive. Quelle cioè a
basso valore aggiunto e ad elevato tasso di ripetitività
come il confezionamento o l’assemblaggio.
Differenze e vantaggi.
A differenza dei robot tradi-
zionali, quelli collaborativi sono chiamati ad operare
in un ambiente più dinamico, dovendo interagire con
l’ambiente e intraprendere azioni opportune. Per certi
versi robot tradizionali e collaborativi segnano ap-
procci industriali diversi. Il primo, prescelto ad esem-
pio dall’industria cinese, è più adatto per produzioni di
massa come quelle dell’automotive o dell’elettronica. Il
secondo si abbina più favorevolmente con produzioni
di nicchia e di qualità, tendenzialmente più diffuse in
Europa e negli Stati Uniti. I robot tradizionali sono più
veloci e non determinano particolari problemi per la
sicurezza. I cobot sono più flessibili, meno costosi, ma
non automatizzano completamente il processo.
Rispetto ai robot tradizionali i robot collaborativi
rispondono perfettamente alle esigenze della pro-
duzione moderna perché si possono spostare e solle-
vare all’occorrenza, collegare ad altre macchine senza
stravolgere la linea produttiva. Assicurano inoltre la
leggerezza del braccio robotico e del quadro di con-
trollo rendendo più semplice l’installazione. Le inter-
facce di programmazione sono di tipo intuitivo grazie
alle modalità teaching, touch screen e multilingua. La
modularità dei cobot rende estremamente semplici le
operazioni di manutenzione. A differenza dei robot
industriali tradizionali, che per funzionare hanno bi-
sogno di essere programmati, i cobot apprendono
work in progress, memorizzando e replicando le ma-