RICERCA
74
progettare 374
•
SETTEMBRE
2013
zione dellamacchina, purtroppo, non
funziona più. Esso, infatti, prevede
di analizzare separatamente i diver-
si sottosistemi: struttura, mandrino,
processo di asportazione, sistema
di controllo, così come l’effetto dei
dispositivi adaptronici. Questa com-
partimentazione produce un’appros-
simazione notevole nella stima del
comportamento dinamico in lavo-
razione, con evidenti ripercussioni
sulla possibilità di prevedere accura-
tamente leprestazioni dellamacchina
conseguenti all’adozione delle varie
scelteprogettuali. Per studiarequeste
interazioni dinamiche e fornire indi-
cazioni utili alla progettazione delle
macchine e di eventuali dispositivi
adaptronici si è imposta una nuova
strategia di progettazione che si basa
sulla realizzazione di un cosiddetto
“modello integrato”, che consideri la
cedevolezza della struttura dellamac-
china, quella del mandrino, quella
delle catene cinematiche, il sistemadi
controllo, il processo di asportazione
ed ogni altro componente in qualche
modo interessato da un flusso di for-
ze. L’adozione del ‘modello integrato’
mette a disposizione del progetti-
sta un potente metodo per simulare
con buona approssimazione quali
saranno le prestazioni della mac-
china, infatti, è addirittura possibile
quantificare non solo la capacità di
asportazione, ma soprattutto quali
possano essere gli effetti in termini di
capacità di asportazione o di accura-
tezzadimodifichedella strutturadella
macchina, così l’adozionedi soluzioni
adaptroniche, già in fase di proget-
to, riducendo sensibilmente tempi e
costi della fase di prototipizzazione e
sviluppo di una macchina.
Strumenti e modelli
Oggigiorno, la realizzazionedi unmo-
dello integrato è supportata dall’uso
di appositi strumenti CAE che stanno
diventando sempre più diffusi. Es-
si consentono di assemblare i vari
modelli numerici per ottenere una
rappresentazione integrata dei feno-
meni principali presenti in un sistema
così complesso come quello di una
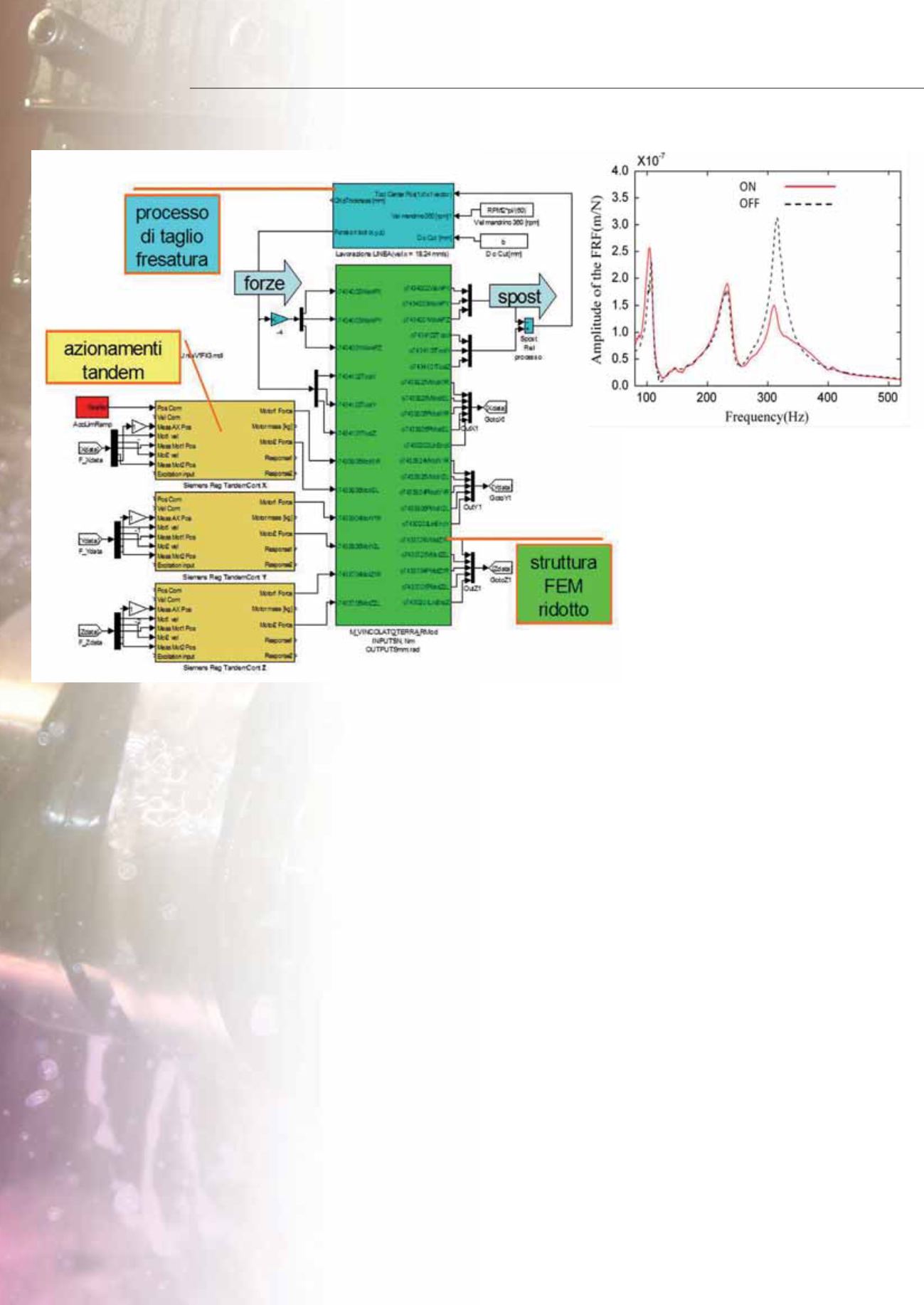
macchina utensile. La modellazione
del sistema di controllo, per esempio,
può essere effettuata nell’ambiente
grafico specializzato Matlab/Simu-
link, dove la struttura della macchina
è rappresentata da unmodello prece-
dentemente sviluppato in ambiente
FEM che ne descrive la dinamica
linearizzata nell’intorno della posizio-
ne degli assi analizzata, compreso lo
specifico utensile previsto. Ritornan-
do al caso della soluzione adaptro-
nica, il modello integrato è in grado
di restituire la risposta dinamica alla
mola nel caso di dispositivo attivato
e disattivato, consentendo al proget-
tista di valutare quantitativamente
la riduzione dei picchi di risonanza.
M. Leonesio, Itia-CNR.
A sinistra il modello integrato in ambiente Matlab/
Simulink. Sopra la risposta dinamica calcolata.


