

















 27 / 36
27 / 36

fluidotecnica
398
MAGGIO
2016
27
Un sistema meccatronico può essere
raffigurato da un sistema in anello
chiuso, dotato di retroazione, costitu-
ito da diversi sottosistemi principali:
l’impianto da controllare che può
essere un attuatore, per esempio un
motore elettrico, un cilindro pneuma-
tico od idraulico, un motore pneuma-
tico; un sistema di controllo asservito
all’attuatore, come una elettronica di
potenza; il controllore dell’impianto,
progettato in ambiente di simulazio-
ne e implementato su centralina; il
sistema di sensorizzazione, che rileva
lo stato del sistema attraverso il rile-
vamento di grandezze fisiche, come
posizione, velocità, accelerazione,
temperatura, forza ed altre utili alla
elaborazione dell’azione di controllo.
I componenti di un sistema mecca-
tronico sono complessi e numerosi,
fondamentali sono gli attuatori, che
potranno avere principi di funziona-
mento anche molto diversi ed essere
coesistenti in un impianto anche in
grado di adattarsi e di rispondere a
esigenze diverse di produzione inmo-
do più o meno autonomo, a seconda
del grado di intelligenza del controllo.
Manipolatori pneumatici
Aziende del settore meccatronica e di
robotica, fin dagli anni 60 del secolo
scorso, hanno rappresentato realtà
italiane che sono state riferimento di
prestigio per l’industria del nostro Pa-
ese nel mondo. Esempi di attuatori
per applicazioni meccatroniche e ro-
botiche sono quelli della società Omas
di Druento presso Torino. La linea di
produzione della Omas comprende
manipolatori e componenti pneuma-
tici e meccatronici di alto livello quali-
tativo che, oltre ad offrire gli ingombri
più ridotti dellacategoria, garantiscono
cicli di vita di lunga durata. Questi
componenti sono costruiti e montati
assemblati in Italia e rappresentano un
riferimento del Made in Italy nel setto-
re. Questi componenti sono progettati
per affrontare lepiùsvariateproblema-
tiche legate al campo della movimen-
tazione robotica, dell’assemblaggio,
dell’automazione di posizione.
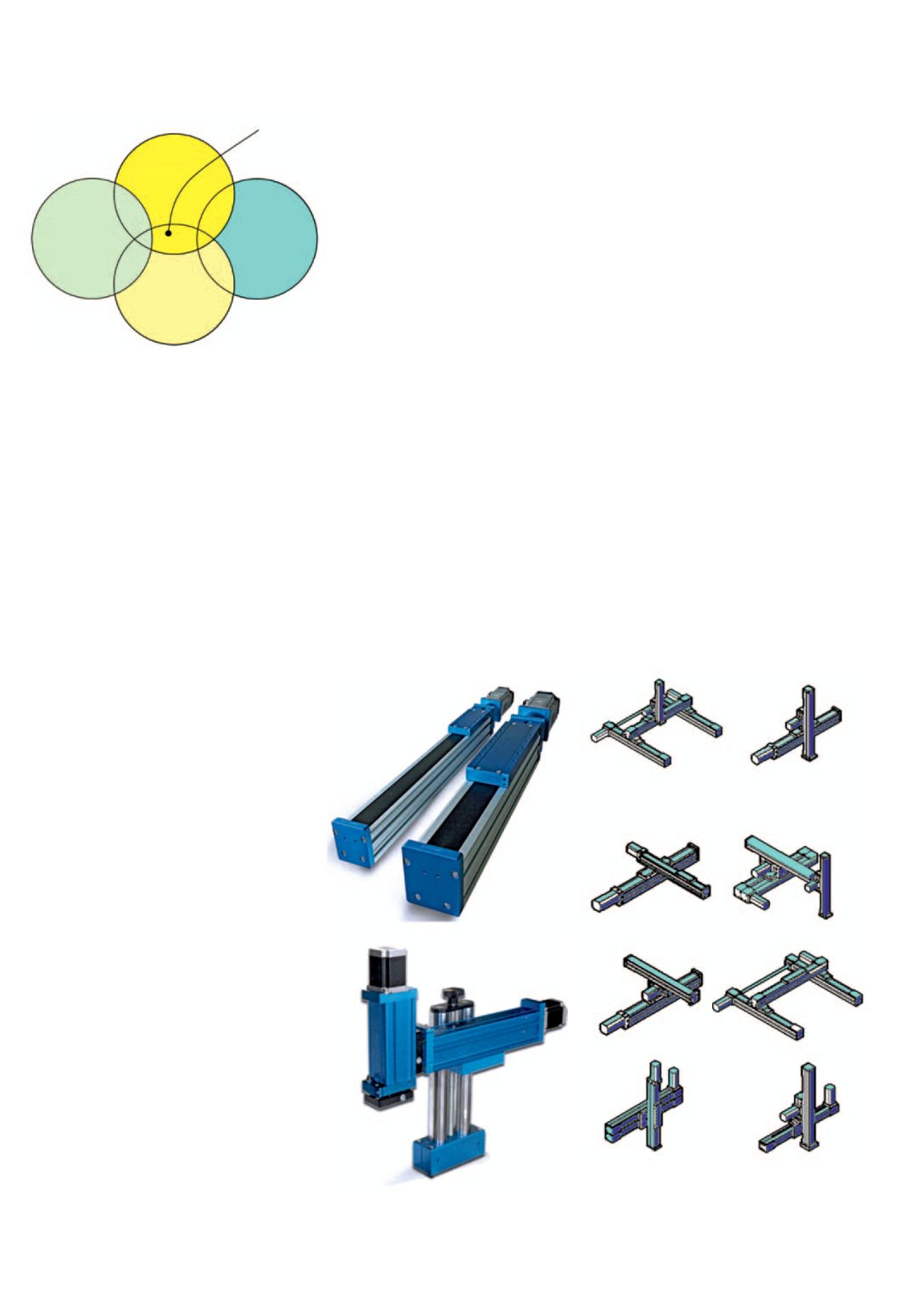
In particolare, la problematica della
movimentazione, in una realtà in evo-
luzione come la produzione industriale
anche di piccola serie versatile e di
necessariamente agile adattamento
allemutevoli esigenze di mercato, può
trarrevantaggioda sistemi componibi-
li e mutabili nel loro assetto. In questa
figura si vedono unità lineari motoriz-
zate, azionate da un servomotore DC
completo di azionamento program-
mabile, utilizzate per la realizzazione
di un sistemi di movimentazione a più
assi elettrici.
Questi moduli lineari sono dotati di
trasmissione con vite a ricircolo di
sfere dalle prestazioni elevate dal
punto di vista dinamico ed in grado di
consentire la realizzazione di sistemi
compatti. Il telaio esterno è un profilo
portante che racchiude il sistema di
guida ed il sistema di trasmissione
risultano protetti dall’esterno inmodo
da permettere la realizzazione dell’in-
tera corsa senza pericolo di ingresso
di polveri e sporcizia nel sistema.
Questo sistema è realizzato con guida
a doppio pattino a ricircolo di sfere.
Sistemi modulari
Nelle figure si possono vedere al-
cuni degli innumerevoli schemi che
è possibile realizzare con tali unità
componibili, a seconda delle esigenze
Schema di componenti per l’automazione
con visioni progettuali meccatroniche.
Sistemi componibili
e mutabili nel loro
assetto.
Alcuni esempi di sistemi di manipolazione.
meccatronica
sistemi
di controllo
sistemi
meccanici
sistemi
elettronici
calcolatori