

















 22 / 36
22 / 36

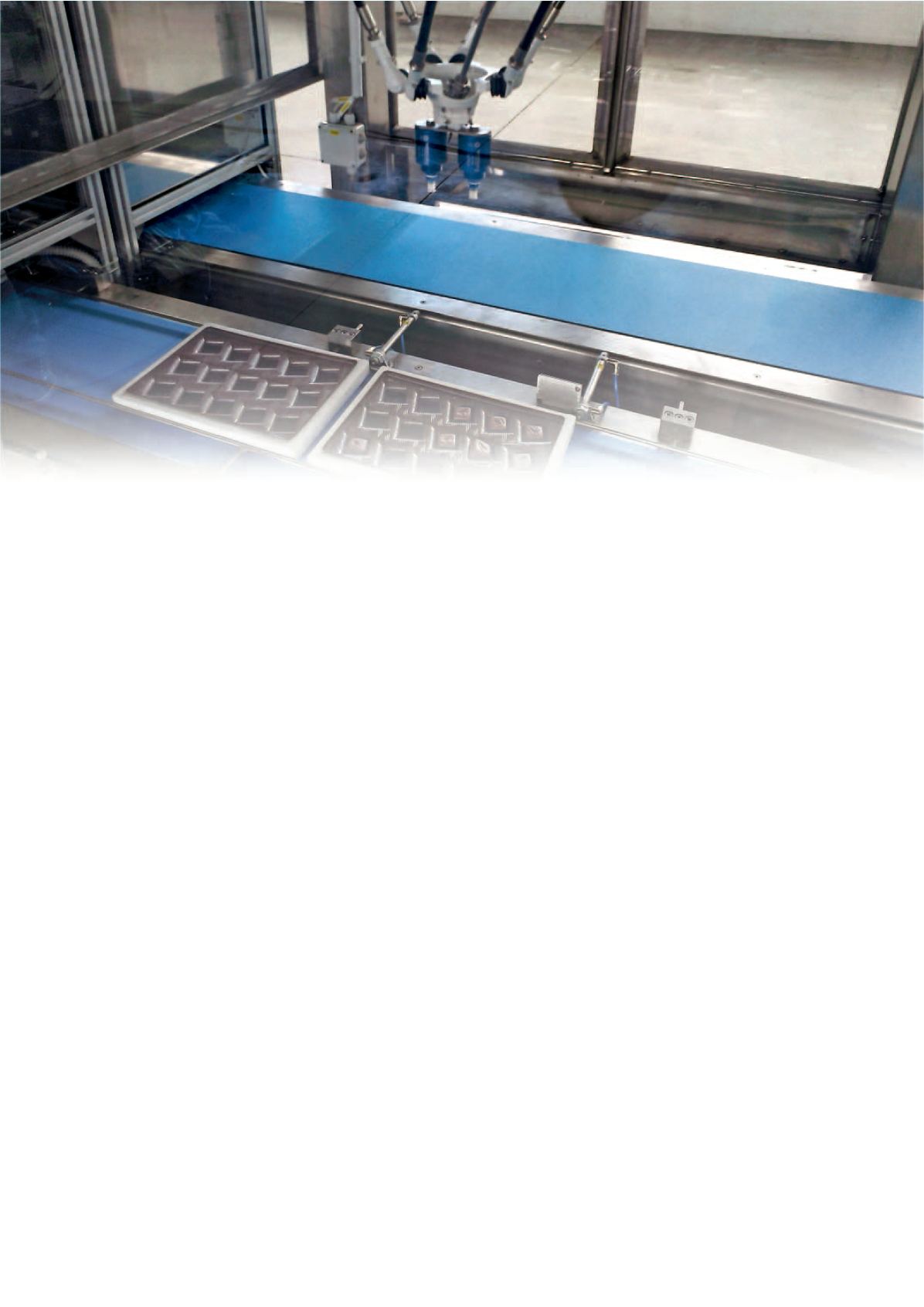
Lapresadi oggetti di piccoledimensioni èuna fasedelicataperchépotrebbecreare
deformazioni, rottureodeformazioni sullasuperficiedamanipolare. Vediamoun’applicazione
di pick&place robotizzatodi pralinedi cioccolato: i cilindri avuotoVuototecnicahanno
permessodi centrare inmanieraperfetta i contenitori preformati, grazieallacompensazione
automaticadellealtezzedei cilindri eallapresastabiledelleventoseadusoalimentare, persino
aunavelocitàmoltoelevata
PNEUMATICA
22
fluidotecnica
398
MAGGIO
2016
col vuoto
La presa di piccoli oggetti stampati
o termoformati così come la sepa-
razione dei fogli di carta, plastica e
di lamiera o di prodotti delicati in
campo alimentare (cracker, praline)
è una fase critica del processo indu-
striale in quanto potrebbero crearsi
deformazioni, rotture o compressioni
indesiderate sulla superficie dei pezzi
da manipolare. In più tutta l’operazio-
ne deve essere svolta in cicli brevi
e veloci con la massima garanzia di
tenuta e precisione, come richiedono
di presa e generazione di vuoto che
siano piccole e leggere. I robot delta
prevedono invece velocità notevoli
e una conseguente compensazione
automatica delle altezze degli oggetti
da prendere, per garantire la preci-
sione. Per quanto riguarda la presa
e manipolazione col vuoto in catena
di montaggio, nelle fasi di produzio-
ne, confezionamento, palettizzazio-
ne e depalettizzazione, Vuototecnica
propone possibilità orientate proprio
verso la flessibilità, la leggerezza dei
Manipolare
nell’
alimentare
gli standard di settore. L’automazione
industriale garantisce infatti flessibili-
tà e affidabilità per reagire a life-cycle
sempre più brevi, nuovi design delle
confezioni e modifiche di prodotto.
Così anche gli organi di presa si sono
dovuti adeguare. L’utilizzo del vuoto
è parsa una delle risposte più perfor-
manti e flessibili. A seconda dei robot
utilizzati le mani di presa e la creazio-
ne del vuoto possono essere differen-
ti: i robot a tre pinze flexible picker,
ad esempio, richiedono tecnologie
RENATO CASTAGNETTI