

















 87 / 120
87 / 120

progettare
406
•
MAGGIO
2017
87
delle macchine automatiche di fine
linea, ben conosciuta nel settore della
robotica per le sue applicazioni inno-
vative nel campo della manipolazione
e per lo sviluppo di complete linee di
imballaggio nel comparto alimenta-
re. Con l’azienda piacentina prosegue
dal 2009 una proficua collaborazione
che si è concretizzata, in questo caso,
nell’allestimento di una linea automa-
tica per il confezionamento di buste di
pasta fresca commissionatodal cliente
Hilcona, con sede in Liechtenstein,
operante nel mercato dei prodotti fre-
schi alimentari.
Il ciclo operativo può essere così sin-
teticamente descritto: i prodotti arri-
vano dalla linea di produzione in fila,
non perfettamente orientati e sono
identificati per tipo e orientamento da
una telecamera, che controlla anche il
posizionamento del cartoncino.
Il robot inserisce i cartoni in una tra-
moggia auto dimensionante che li for-
ma. Un manipolatore a 6 assi utilizza
due magazzini, il primo durante la
produzione del formato, il secondo
che viene dimensionato sul formato
seguente e riempito.
Successivamente, i cartoni vengono
posizionati su un trasportatore inclina-
to avente tenuta cartone con il vuoto.
Due robot scaraToshibaTH650 ad alta
velocità riempiono i cartoni con prese
dedicate (speciali ventose studiate sul
prodotto).
Un secondo manipolatore a 6 assi
preleva la fustella del coperchio e lo
applica sul vassoio che è stato pre-
cedentemente chiuso: le fustelle del
coperchio sono prelevate dai magaz-
zini con la stessa logica indicata sopra
per i vassoi.
Il cartone viene quindi ruotato di 180°
(il coperchio è di fatto il vassoio espo-
sitore) e pesato, mentre le confezioni
non conformi vengono scartate. Tutte
le operazioni sono realizzate con un
cambio formatoautomaticodadisplay
(2 minuti), con velocità di arrivo pro-
dotti di 60/70 pezzi al minuto.
di necessità, bloccheranno immedia-
tamente la macchina stessa, mandan-
dola in allarme.
Per facilitare le operazioni di pulizia e
manutenzione del nastro, la struttura è
stata realizzata con tubolari in acciaio
inox disposi a 45° e saldati in continuo,
inoltre tutti i rulli sonomontati a sbalzo.
Soluzione di packaging
Vediamo ora un’altra applicazione
messa in atto daTiesse Robot.
I performanti robot scaraToshiba, com-
mercializzati in Italiadaquestaazienda,
sono stati inseriti con successo in un
nuovo impianto di packaging proget-
tato con Futura Robotica di Alseno
(Piacenza), da molti anni sul mercato
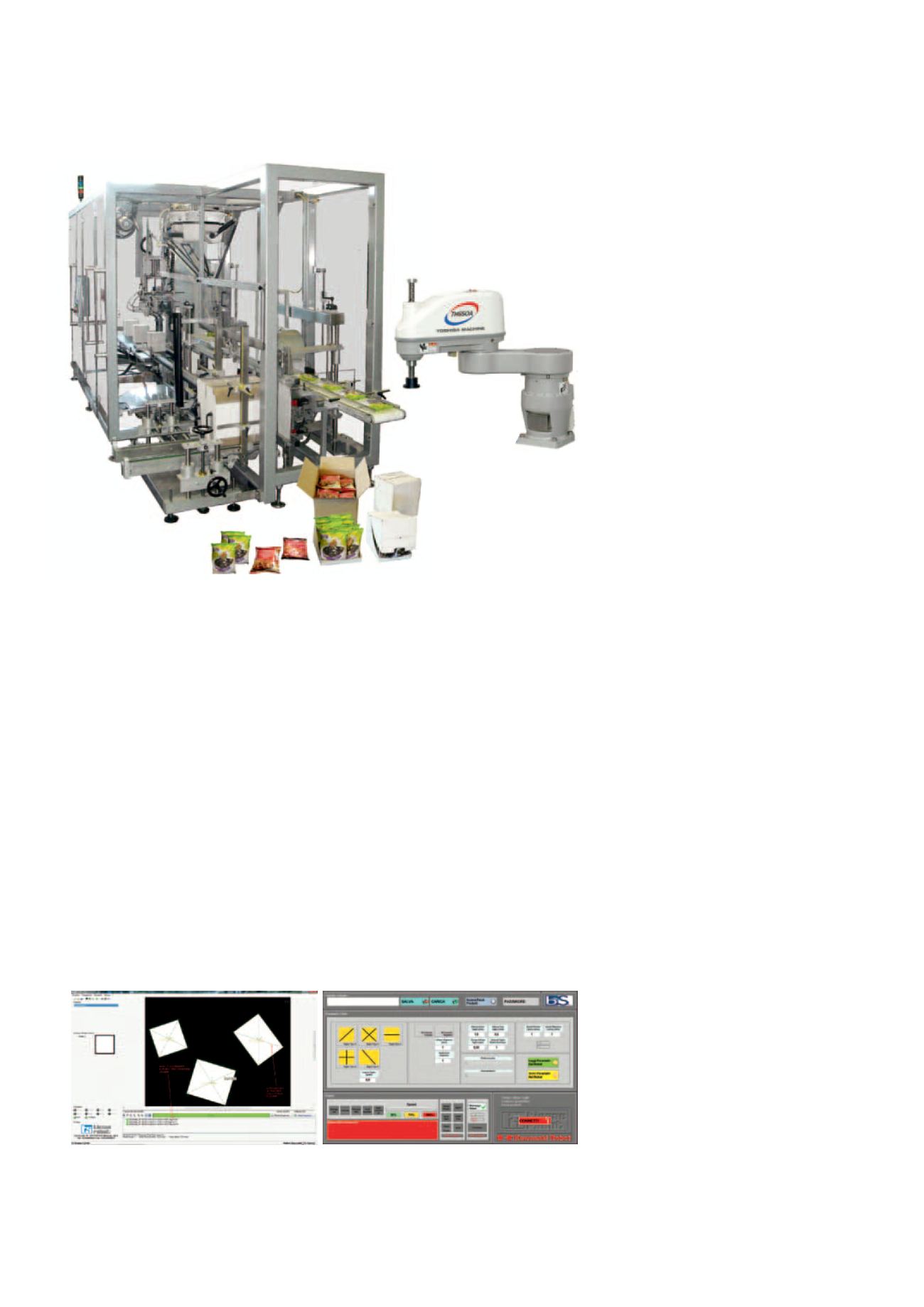
A sinistra, impianto
di packaging Futura
Robotica; a destra,
robot scara Toshiba
TH650 ad alta
velocità.
tono di eseguire le più svariate figu-
re; per la sua programmazione viene
utilizzata una tastiera touch screen
a colori. Sul robot è stata installata
una lama a ultrasuoni con dimensioni
e frequenze appropriate al prodotto
da lavorare. Per ottimizzare le sue
funzioni, la macchina è stata quindi
dotata del sistema di visione che, in-
terfacciato al robot, gli fornisce tutte
le informazioni per poter eseguire le
varie operazioni di lavoro.
Tramite PC si possono gestire le diffe-
renti varianti di lavoro e archiviarle in
ricette per essere richiamate succes-
sivamente. La macchina finalizzata al
taglio di tramezzini è provvista di tutte
le protezioni necessarie che, in caso
L’intervento dei tecnici della divisione ricerca e sviluppo di Tiesse Robot sul pacchetto di visione
ha permesso di realizzare una personalizzazione molto spinta per l’applicazione.