

















 57 / 68
57 / 68

progettare
395
GENNAIO
/
FEBBRAIO
2016
57
Gestire lo spazio cartesiano
La limitazione sicura dello spazio car-
tesiano, così è giusto chiamare l’esito
delle funzionalità appena descritte,
può agire in tre differenti modi. Il la-
voro del robot può essere circoscritto
all’interno di uno spazio preciso; può
essere programmato per non invade-
re una zona definita come ‘proibita’
o ancora può essere abilitato a ge-
nerare un segnale quando avviene
la violazione del ‘tool center point’.
Se a queste opportunità di controllo
si aggiunge che specifici parametri
consentono sia una limitazione si-
cura dell’orientamento nello spazio
anche di eventuali utensili applicati
alla flangia del robot durante il lavo-
ro, sia la previsione della distanza di
fermata della macchina, ci troviamo
di fronte, davvero, alla fabbrica che si
fa intelligente e che va verso un’inte-
razione efficiente tra persone e robot.
Occorre qualcosa di diverso rispetto
al solito nella programmazione del
ciclo per sfruttare le funzionalità Ro-
boSafe Comau? La risposta è no: non
ci sono differenze di programmazione
tra un ciclo di lavoro con un robot in
versione safe e uno standard. Ciò che
cambia è, semplicemente, la presenza
di interfacce dedicate ai parametri
di sicurezza presenti nel software
del ‘teach pendant comau’, TP5, e
del controllo di quinta generazione,
Comau C5G, attivabili e gestibili, pe-
raltro, direttamente dall’operatore
qualificato. La dotazione RoboSafe
di Comau non è che il primo pas-
so. L’azienda sta investendo grandi
energie per permettere ai robot di
diventare ancora più collaborativi e
sicuri e superare quella che per tutti
è la frontiera del futuro: controllare,
oltre alla velocità e alla posizione
nello spazio del robot, anche la forza
per progettare aree di lavoro uomo-
macchina totalmente condivise, dove
lamacchina possa interagire adattan-
dosi autonomamente alla vicinanza
con l’uomo.
rie del robot stesso. L’azione combinata
di questi controlli fa sì che la macchina
riduca a zero i fermi di produzione. Co-
me? Conoscendo in ogni istante posi-
zione della macchina, le traiettorie che
sta compiendo nonché, integrando le
informazioni dei sensori di sicurezza, la
posizionedellepersoneinfunzionedegli
spazi stessi delle traiettorie e del robot.
Risposta flessibile
Si assisterà quindi a un rallentamento
dell’azione del robot all’approssimarsi
dell’operatore, ma si avrà un fermo
esclusivamente se questi sarà realmen-
te nell’area di lavoro. All’allontanarsi,
infine, dell’operatore, il robot tornerà a
muoversi alla velocità corretta, ripren-
dendo a lavorare a pieno ritmo.
I vantaggi RoboSafe paiono subito e-
videnti: da un lato si ha, come appena
ricordato, la riduzione fino a (pressoché)
zero dei fermi produzione, con i relativi
vantaggi in termini di resa, efficienza e
produttività; dall’altro, come vedremo,
le celle ospitanti le macchine possono
essere progettate con minor ingombri.
Nonoccorrepiù, infatti, proteggere tutta
l’area potenziale di lavoro del robot, ma
solo quella, volta per volta, effettiva-
mente interessata dai movimenti della
macchina. Dato che a una riduzione
delladimensionedellacellacorrisponde
la riduzione di layout occupato, anche
questa opportunità si traduce in un ri-
sparmio economico. Se ancora non è
possibile parlare di collaborazione diret-
ta, e in totalesicurezza, trauomoe robot,
sicuramente la soluzione RoboSafe di
Comau rappresenta un passo avanti di
notevole importanza. Grazie agli ultimi
sviluppi che portano a un controllo pun-
tualedellospaziocartesiano,glioperato-
ri possono muoversi in totale sicurezza
inun’areadilavoroattiguaalrobotsenza
indurre fermi macchina.
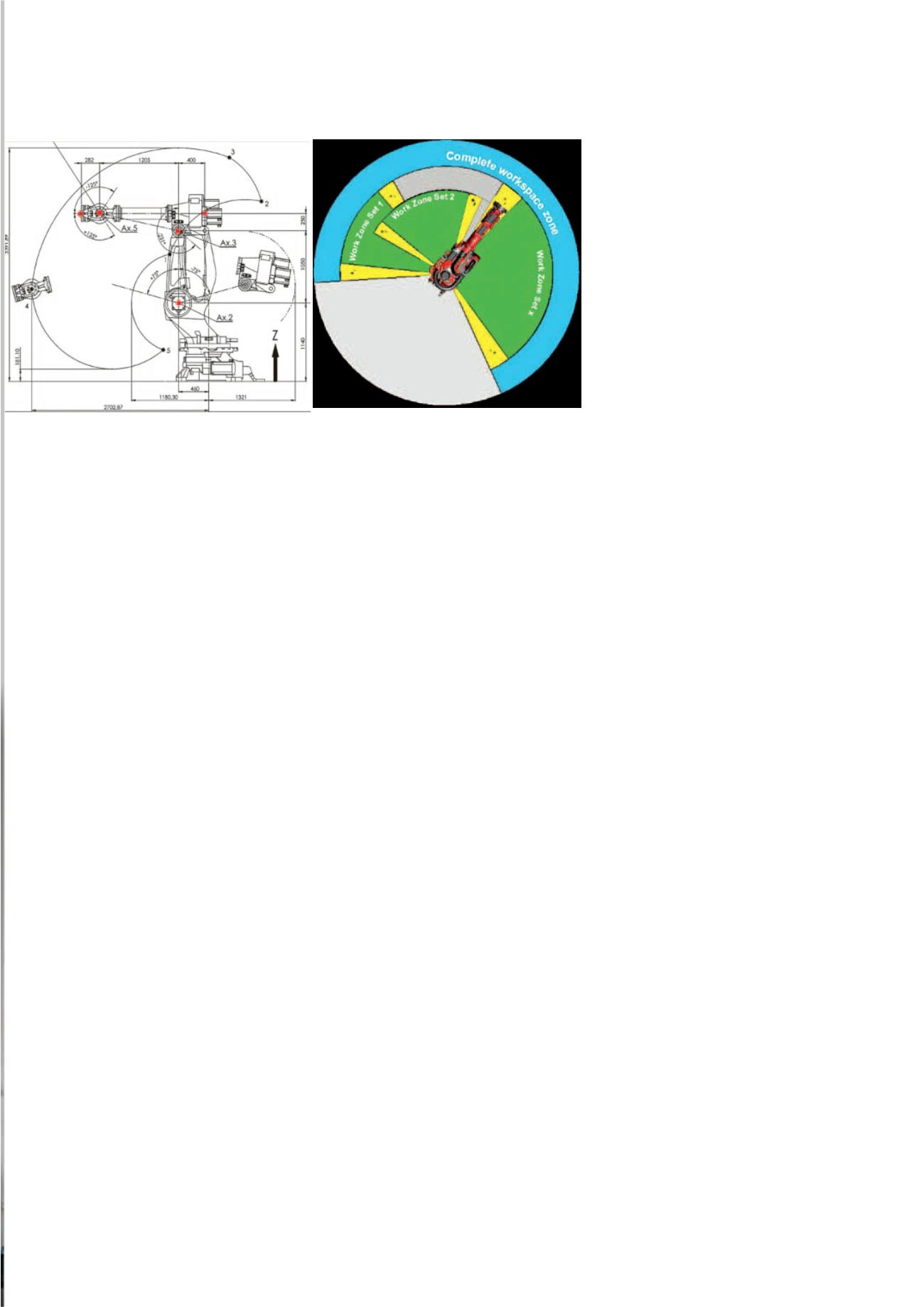
Il funzionamento risulta semplice: con il
controllodellospaziocartesiano, ovvero
dello spazio tridimensionale occupato
dal robot edai suoi assi, l’areadella cella
viene suddivisa in porzioni con diversi
gradi di criticità.
All’interno di ciascuna porzione, e in
maniera direttamente proporzionale
proprio alla criticità corrispondente, il
robot assumerà comportamenti dif-
ferenti (rallentamento o ripresa, stop,
azione normale, accelerazione ecc.) in
funzione della tipologia di ‘violazione’
commessa dall’operatore in ciascuna
delle porzioni individuate. Ciò significa,
come anticipato, che il robot può lavo-
rare in alcune aree della cella, mentre
l’operatore può svolgere altre attività
in un’altra porzione, oppure occuparsi
di attività di manutenzione alla cella
stessa o ad aree di lavoro attigue senza,
appunto, causare un fermo produzione.
Il lavoro del robot può essere circoscritto all’interno di uno spazio preciso; può essere programmato per
non invadere una zona definita come ‘proibita’ o ancora può essere abilitato a generare un segnale
quando avviene una ‘intrusione’.