Cartesiano vs antropomorfo, pregi e sinergie secondo Rollon
-

- Tweet
- Pin It
- Condividi per email
-
Vari sono gli ambiti applicativi di automazione in cui un sistema cartesiano può rappresentare secondo Rollon una soluzione altrettanto valida, se non più favorevole, rispetto al ricorso a robot antropomorfi.
Ciò dipende da una serie di condizioni operative, o di layout produttivo, che ne consigliano l’impiego, espressamente quando ci si trova di fronte a lunghe linee di produzione con diverse stazioni attraversate da semi-lavorati, o con layout con spazio limitato a bordo macchina, ma con la possibilità di escursioni verticali. E’ sicuramente il caso di una serie di settori industriali, come packaging, lavorazione lamiera, logistica, food & beverage, automotive e verniciatura.
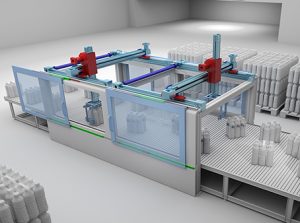
Rollon rileva quindi innanzitutto come i sistemi automatizzati lineari cartesiani garantiscano massimi risultati e prestazioni nei casi in cui l’applicazione richieda una movimentazione lineare su un’area di lavoro estesa, ampia e multi-stazione. In una tale situazione, sarebbero molti i robot antropomorfi da installare e mantenere per svolgere lo stesso lavoro di asservimento di un solo cartesiano, facendo di quest’ultimo la soluzione economicamente più efficiente. In grado peraltro di asservire produzioni multi-stazione senza mai interrompere il proprio lavoro, muovendosi anzi da un punto all’altro del processo laddove serve movimentazione o asservimento.
 Altro requisito che fa propendere per la soluzione cartesiana è quindi la necessità di lasciare libero da ingombri lo spazio di asservimento di una linea, così come la necessità di movimentare carichi molto importanti sull’asse Z, nettamente superiori alle capacità di un robot antropomorfo. Modalità che consente inoltre di liberare l’area di lavoro, facendo ‘scomparire’ dalla macchina asse e utensile, mantenendo il carico fermo nella posizione richiesta assicurando precisione e ripetibilità, senza rinunciare a dinamiche decisamente elevate.
Altro requisito che fa propendere per la soluzione cartesiana è quindi la necessità di lasciare libero da ingombri lo spazio di asservimento di una linea, così come la necessità di movimentare carichi molto importanti sull’asse Z, nettamente superiori alle capacità di un robot antropomorfo. Modalità che consente inoltre di liberare l’area di lavoro, facendo ‘scomparire’ dalla macchina asse e utensile, mantenendo il carico fermo nella posizione richiesta assicurando precisione e ripetibilità, senza rinunciare a dinamiche decisamente elevate.
La soluzione cartesiana, inoltre, soddisfa anche l’esigenza di movimentazioni indipendenti su un medesimo asse che possono risultare necessarie per ottimizzare il ciclo di lavoro. La movimentazione sui 3 assi X, Y, Z può infatti essere impostata secondo singole esigenze di spostamento e asservimento allo stesso tempo o, come detto, in maniera autonoma. Questa opportunità è data dall’uso di soluzioni multi-carro capaci di movimentare i carichi di lavoro singolarmente o a gruppi di più unità, alimentando in maniera differente – e specifica – diverse aree del processo produttivo. Ad esempio, è possibile sfruttare una trasmissione a cremagliera sull’asse Y con asse X sincronizzato e Z indipendente o altre combinazioni specifiche muovendo anche 14 carri nel medesimo processo o istante, in funzione dell’applicazione progettata e avviata.
Infine, altra variabile da tenere in considerazione sono la semplicità di montaggio e manutenzione. Malgrado infatti la costruzione di una soluzione cartesiana abbia un costo di base più elevato rispetto a un singolo robot antropomorfo (rapporto che decresce però al numero di unità necessarie per asservire più stazioni), la manutenzione risulta più semplice ed economica, mettendo la gestione dei portali alla portata dei tecnici interni dell’azienda e senza ricorso al service post vendita e ai tempi e costi dell’assistenza associata a un robot antropomorfo.
Rollon sottolinea infine come la dinamicità del cartesiano venga bilanciata dalla flessibilità operativa del robot antropomorfo, osservando però anche come molto spesso i costi di riallocazione e correlata riprogrammazione e costruzione di gripper specifici abbiano una considerevole incidenza.
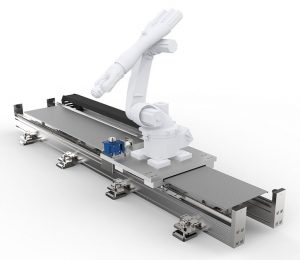 Vi è infine un campo in cui le capacità e i pregi dei due sistemi si incontrano, ovvero quando ci sono le condizioni perché un robot venga movimentato da un asse lineare esterno, diventando di fatto il settimo grado di libertà, o settimo asse. Ciò consente di ampliare l’area del lavoro del robot, tipicamente di fronte a un nuovo progetto o per incrementare le performance della linea esistente. L’impiego di un settimo asse sopperisce quindi alle carenze di tutte le soluzioni statiche.
Vi è infine un campo in cui le capacità e i pregi dei due sistemi si incontrano, ovvero quando ci sono le condizioni perché un robot venga movimentato da un asse lineare esterno, diventando di fatto il settimo grado di libertà, o settimo asse. Ciò consente di ampliare l’area del lavoro del robot, tipicamente di fronte a un nuovo progetto o per incrementare le performance della linea esistente. L’impiego di un settimo asse sopperisce quindi alle carenze di tutte le soluzioni statiche.
Un robot antropomorfo che si muove sul settimo asse può infatti:
- Incrementare la propria flessibilità, operando – nel limite del possibile e delle attività da svolgere – su più stazioni/macchine o permettendo anche a differenti robot di muoversi lungo il medesimo asse
- Incrementare resa ed efficienza (anche economica) della macchina che, muovendosi, può essere impiegata in diverse stazioni aumentando le proprie funzioni e il ritorno di investimento
- Incrementare, complessivamente, il rendimento della linea trasferendo da un punto all’altro del layout le proprie capacità operative in termini di precisione, velocità, ripetibilità.
Contenuti correlati
-
 Automazione robotizzata intralogistica Cognibotics con Keba
Automazione robotizzata intralogistica Cognibotics con KebaCognibotics, azienda svedese fondata nel 2013 e specializzata in soluzioni robotiche avanzate per applicazioni di movimentazione e trasporto dei materiali, si è affidata alla piattaforma di automazione KeMotion di Keba per mettere a punto un’applicazione robotizzata di...
-
 Employer branding con la gestione esternalizzata dell’abbigliamento da lavoro di Mewa
Employer branding con la gestione esternalizzata dell’abbigliamento da lavoro di MewaLa gestione esternalizzata dell’abbigliamento da lavoro proposta dal fornitore di servizi tessili Mewa risponde perfettamente alla forte carenza di personale qualificato che le aziende affrontano, diventando un vantaggio strategico nel recruiting. Mentre gli artigiani fanno i conti...
-
 Nuova piattaforma per la supply chain, debutto a Bergamo nel 2027 per Logistics HUB
Nuova piattaforma per la supply chain, debutto a Bergamo nel 2027 per Logistics HUBHannover Fairs International GmbH, filiale italiana del Gruppo Deutsche Messe AG, già organizzatore di eventi dedicati alla logistica, annuncia il lancio di Logistics HUB, il nuovo business event che debutterà il 19 e 20 maggio 2027 presso...
-
 Elesa conclude l’acquisizione del 100% di Tellure Rôta
Elesa conclude l’acquisizione del 100% di Tellure RôtaElesa S.p.A., azienda italiana protagonista nella progettazione e produzione di componenti standard per l’industria meccanica e dell’automazione, annuncia l’acquisizione del 100% del capitale sociale di Tellure Rôta S.p.A., realtà specializzata nella progettazione e produzione di ruote e...
-
 Centro di lavoro a 5 assi compatto da Hermle
Centro di lavoro a 5 assi compatto da HermleIl centro di lavorazione a 5 assi Hermle C12 viene incontro alle esigenze degli utenti che richiedono superfici di installazione sempre più ridotte. Oltre che per la compattezza, la macchina si distingue per le competenze chiave di...
-
 Intralogistica Italia 2028, iscrizioni aperte per la fase early bird di adesione
Intralogistica Italia 2028, iscrizioni aperte per la fase early bird di adesioneSono ufficialmente aperte dal 1° luglio 2026 le iscrizioni a Intralogistica Italia 2028, la manifestazione B2B punto di riferimento per intralogistica, movimentazione dei materiali e automazione dei magazzini, in programma in FieraMilano Rho dal 29 maggio al...
-
 Cuscinetto ibrido igus per incrementare l’efficienza dei nastri trasportatori aerei
Cuscinetto ibrido igus per incrementare l’efficienza dei nastri trasportatori aereiNell’industria e nel settore della logistica, gli ambienti polverosi possono rappresentare un problema per i nastri trasportatori aerei. Quando sporco e polvere si depositano sui più comuni cuscinetti metallici, possono causare rallentamenti e, nel peggiore dei casi,...
-
 Rafforzamento negli umanoidi, STMicroelectronics entra nel capitale di Oversonic Robotics
Rafforzamento negli umanoidi, STMicroelectronics entra nel capitale di Oversonic RoboticsOversonic Robotics, società italiana di robotica cognitiva creatrice di RoBee, il primo robot umanoide cognitivo certificato per operare in ambienti complessi, annuncia che STMicroelectronics, Fondazione ENEA Tech e Biomedical e SpotInvest sono entrati nel capitale della Società...
-
 Medaglia Platinum EcoVadis a RS Italia, eccellenza ESG per il terzo anno consecutivo
Medaglia Platinum EcoVadis a RS Italia, eccellenza ESG per il terzo anno consecutivoRS Italia, parte di RS Group plc, fornitore omnicanale globale di prodotti e soluzioni in ambito MRO per clienti industriali, ha conquistato per il terzo anno consecutivo la Medaglia platinum EcoVadis, rafforzando il proprio posizionamento tra le...
-
 Verniciatura integrata chiavi in mano a basse emissioni Dürr per Volkswagen Autoeuropa
Verniciatura integrata chiavi in mano a basse emissioni Dürr per Volkswagen AutoeuropaDürr sta realizzando un reparto di verniciatura chiavi in mano per Volkswagen Autoeuropa, implementando nel contempo anche una soluzione software completa. Il progetto combina tecnologie di applicazione ed essiccazione all’avanguardia progettate per massimizzare la riduzione delle emissioni...
Scopri le novità scelte per te
-
Automazione robotizzata intralogistica Cognibotics con Keba
Cognibotics, azienda svedese fondata nel 2013 e specializzata in soluzioni robotiche avanzate per applicazioni di movimentazione e...
-
Employer branding con la gestione esternalizzata dell’abbigliamento da lavoro di Mewa
La gestione esternalizzata dell’abbigliamento da lavoro proposta dal fornitore di servizi tessili Mewa risponde perfettamente alla forte...



Mercato Tutti ▶
-
 Automazione robotizzata intralogistica Cognibotics con Keba
Automazione robotizzata intralogistica Cognibotics con KebaCognibotics, azienda svedese fondata nel 2013 e specializzata in soluzioni robotiche avanzate per applicazioni...
-
 Siemens e Luna Rossa ampliano la collaborazione nell’ingegneria digitale integrata
Siemens e Luna Rossa ampliano la collaborazione nell’ingegneria digitale integrataSiemens annuncia di aver ampliato la propria partnership nel campo dell’ingegneria digitale con Luna...
-
 Employer branding con la gestione esternalizzata dell’abbigliamento da lavoro di Mewa
Employer branding con la gestione esternalizzata dell’abbigliamento da lavoro di MewaLa gestione esternalizzata dell’abbigliamento da lavoro proposta dal fornitore di servizi tessili Mewa risponde...
Tecnologie Tutti ▶
-
 Illuminazione LED wenglor per applicazioni di machine vision
Illuminazione LED wenglor per applicazioni di machine visionwenglor lancia LBF, l’illuminazione a barre LED per applicazioni di machine vision progettata specificamente...
-
 Cuscinetto ibrido igus per incrementare l’efficienza dei nastri trasportatori aerei
Cuscinetto ibrido igus per incrementare l’efficienza dei nastri trasportatori aereiNell’industria e nel settore della logistica, gli ambienti polverosi possono rappresentare un problema per...
-
 Potenza della tomografia in officina resa semplice con la soluzione di Ready
Potenza della tomografia in officina resa semplice con la soluzione di ReadyReady presenta CoreX ONE, tomografo industriale progettato per l’officina che consente di misurare dimensioni...

{kind=link}