Cartesiano vs antropomorfo, pregi e sinergie secondo Rollon
-

- Tweet
- Pin It
- Condividi per email
-
Vari sono gli ambiti applicativi di automazione in cui un sistema cartesiano può rappresentare secondo Rollon una soluzione altrettanto valida, se non più favorevole, rispetto al ricorso a robot antropomorfi.
Ciò dipende da una serie di condizioni operative, o di layout produttivo, che ne consigliano l’impiego, espressamente quando ci si trova di fronte a lunghe linee di produzione con diverse stazioni attraversate da semi-lavorati, o con layout con spazio limitato a bordo macchina, ma con la possibilità di escursioni verticali. E’ sicuramente il caso di una serie di settori industriali, come packaging, lavorazione lamiera, logistica, food & beverage, automotive e verniciatura.
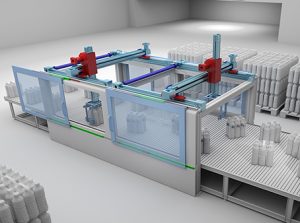
Rollon rileva quindi innanzitutto come i sistemi automatizzati lineari cartesiani garantiscano massimi risultati e prestazioni nei casi in cui l’applicazione richieda una movimentazione lineare su un’area di lavoro estesa, ampia e multi-stazione. In una tale situazione, sarebbero molti i robot antropomorfi da installare e mantenere per svolgere lo stesso lavoro di asservimento di un solo cartesiano, facendo di quest’ultimo la soluzione economicamente più efficiente. In grado peraltro di asservire produzioni multi-stazione senza mai interrompere il proprio lavoro, muovendosi anzi da un punto all’altro del processo laddove serve movimentazione o asservimento.
 Altro requisito che fa propendere per la soluzione cartesiana è quindi la necessità di lasciare libero da ingombri lo spazio di asservimento di una linea, così come la necessità di movimentare carichi molto importanti sull’asse Z, nettamente superiori alle capacità di un robot antropomorfo. Modalità che consente inoltre di liberare l’area di lavoro, facendo ‘scomparire’ dalla macchina asse e utensile, mantenendo il carico fermo nella posizione richiesta assicurando precisione e ripetibilità, senza rinunciare a dinamiche decisamente elevate.
Altro requisito che fa propendere per la soluzione cartesiana è quindi la necessità di lasciare libero da ingombri lo spazio di asservimento di una linea, così come la necessità di movimentare carichi molto importanti sull’asse Z, nettamente superiori alle capacità di un robot antropomorfo. Modalità che consente inoltre di liberare l’area di lavoro, facendo ‘scomparire’ dalla macchina asse e utensile, mantenendo il carico fermo nella posizione richiesta assicurando precisione e ripetibilità, senza rinunciare a dinamiche decisamente elevate.
La soluzione cartesiana, inoltre, soddisfa anche l’esigenza di movimentazioni indipendenti su un medesimo asse che possono risultare necessarie per ottimizzare il ciclo di lavoro. La movimentazione sui 3 assi X, Y, Z può infatti essere impostata secondo singole esigenze di spostamento e asservimento allo stesso tempo o, come detto, in maniera autonoma. Questa opportunità è data dall’uso di soluzioni multi-carro capaci di movimentare i carichi di lavoro singolarmente o a gruppi di più unità, alimentando in maniera differente – e specifica – diverse aree del processo produttivo. Ad esempio, è possibile sfruttare una trasmissione a cremagliera sull’asse Y con asse X sincronizzato e Z indipendente o altre combinazioni specifiche muovendo anche 14 carri nel medesimo processo o istante, in funzione dell’applicazione progettata e avviata.
Infine, altra variabile da tenere in considerazione sono la semplicità di montaggio e manutenzione. Malgrado infatti la costruzione di una soluzione cartesiana abbia un costo di base più elevato rispetto a un singolo robot antropomorfo (rapporto che decresce però al numero di unità necessarie per asservire più stazioni), la manutenzione risulta più semplice ed economica, mettendo la gestione dei portali alla portata dei tecnici interni dell’azienda e senza ricorso al service post vendita e ai tempi e costi dell’assistenza associata a un robot antropomorfo.
Rollon sottolinea infine come la dinamicità del cartesiano venga bilanciata dalla flessibilità operativa del robot antropomorfo, osservando però anche come molto spesso i costi di riallocazione e correlata riprogrammazione e costruzione di gripper specifici abbiano una considerevole incidenza.
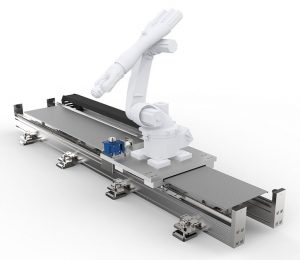 Vi è infine un campo in cui le capacità e i pregi dei due sistemi si incontrano, ovvero quando ci sono le condizioni perché un robot venga movimentato da un asse lineare esterno, diventando di fatto il settimo grado di libertà, o settimo asse. Ciò consente di ampliare l’area del lavoro del robot, tipicamente di fronte a un nuovo progetto o per incrementare le performance della linea esistente. L’impiego di un settimo asse sopperisce quindi alle carenze di tutte le soluzioni statiche.
Vi è infine un campo in cui le capacità e i pregi dei due sistemi si incontrano, ovvero quando ci sono le condizioni perché un robot venga movimentato da un asse lineare esterno, diventando di fatto il settimo grado di libertà, o settimo asse. Ciò consente di ampliare l’area del lavoro del robot, tipicamente di fronte a un nuovo progetto o per incrementare le performance della linea esistente. L’impiego di un settimo asse sopperisce quindi alle carenze di tutte le soluzioni statiche.
Un robot antropomorfo che si muove sul settimo asse può infatti:
- Incrementare la propria flessibilità, operando – nel limite del possibile e delle attività da svolgere – su più stazioni/macchine o permettendo anche a differenti robot di muoversi lungo il medesimo asse
- Incrementare resa ed efficienza (anche economica) della macchina che, muovendosi, può essere impiegata in diverse stazioni aumentando le proprie funzioni e il ritorno di investimento
- Incrementare, complessivamente, il rendimento della linea trasferendo da un punto all’altro del layout le proprie capacità operative in termini di precisione, velocità, ripetibilità.
Contenuti correlati
-
 Tecnologia a ultrasuoni nei controlli non distruttivi da Xarion Laser Acoustics
Tecnologia a ultrasuoni nei controlli non distruttivi da Xarion Laser AcousticsXarion Laser Acoustics presenta alla ECNDT 2026, il principale appuntamento europeo dedicato ai controlli non distruttivi, in programma a Verona dal 15 al 19 giugno, LEA (Laser Excited Acoustics), una innovativa tecnologia per i controlli non distruttivi...
-
 Massimo Valerii eletto alla guida di Anie CSI
Massimo Valerii eletto alla guida di Anie CSIAnie CSI, l’Associazione di Federazione Anie che rappresenta l’industria dei Componenti e Sistemi per Impianti, ha eletto presidente per il biennio 2026-2028 Massimo Valerii che guiderà l’Associazione in una fase cruciale per la transizione energetica e digitale...
-
 Microtecniche in mostra per la sostenibilità a Micronora 2026 a fine settembre
Microtecniche in mostra per la sostenibilità a Micronora 2026 a fine settembreLa fiera internazionale Micronora aprirà i battenti a Besançon (Francia) dal 29 settembre al 2 ottobre 2026. Evento di punta nel settore delle microtecniche e della precisione, Micronora propone soluzioni e innovazioni specifiche dell’ecosistema più esteso dedicato...
-
 Motori elettrici Teco nella movimentazione efficiente di foraggi nei silos
Motori elettrici Teco nella movimentazione efficiente di foraggi nei silosAvendo riscontrato una serie di problematiche nella gestione del carico dei foraggi all’interno di alcuni impianti, un importante costruttore di silos del bresciano si è rivolto a Teco, azienda di Brescia specializzata nel settore della movimentazione agricola...
-
 Configuratore online per infrastrutture di ricarica DC da Keba
Configuratore online per infrastrutture di ricarica DC da KebaKeba Mobility ha reso disponibile il nuovo configuratore per soluzioni di ricarica DC, un tool online pensato per semplificare e accelerare la progettazione di infrastrutture di ricarica a corrente continua. Grazie a un’interfaccia intuitiva e a un...
-
 Maurizio Bertocco designato alla presidenza di Ucima
Maurizio Bertocco designato alla presidenza di UcimaLa Commissione di designazione di Ucima (Unione dei costruttori italiani di macchine automatiche per il confezionamento e l’imballaggio) ha individuato in Maurizio Bertocco, presidente e amministratore delegato di ILPRA SpA, il candidato alla presidenza dell’Associazione per il...
-
 Sollevatore telescopico Merlo per attività di manutenzione ai piedi del Monte Bianco
Sollevatore telescopico Merlo per attività di manutenzione ai piedi del Monte BiancoIl sollevatore telescopico Merlo TF30.9 è stato scelto per la gestione delle attività di manutenzione ordinaria e straordinaria della funivia SkyWay, infrastruttura iconica ai piedi del Monte Bianco. Le attività manutentive si svolgono presso la stazione di...
-
 Hermle, manifattura significa saper fare
Hermle, manifattura significa saper fareLo scorso aprile (dal 21 al 24), in occasione della tradizionale open house Hermle, l’azienda ha aperto le porte del proprio centro tecnologico e di formazione. In tutte le giornate il costruttore tedesco ha accolto visitatori provenienti...
-
 Professioni e competenze del futuro agli School Tech Awards 2026 di Siemens
Professioni e competenze del futuro agli School Tech Awards 2026 di SiemensSi è svolta lo scorso mercoledì 3 giugno, presso Fondazione Dalmine, la cerimonia finale di premiazione degli School Tech Awards 2026 organizzati da Siemens, iniziativa che mira a colmare il crescente divario tra domanda e offerta di...
-
 Frontier AI, Anthropic arriva in Italia con l’apertura di una sede a Milano
Frontier AI, Anthropic arriva in Italia con l’apertura di una sede a MilanoAnthropic ha annunciato l’apertura di un nuovo ufficio a Milano, il sesto in Europa dopo Londra, Dublino, Parigi, Zurigo e Monaco. Il team di professionisti di Anthropic con sede milanese lavorerà con le aziende italiane e con...
Scopri le novità scelte per te
-
Tecnologia a ultrasuoni nei controlli non distruttivi da Xarion Laser Acoustics
Xarion Laser Acoustics presenta alla ECNDT 2026, il principale appuntamento europeo dedicato ai controlli non distruttivi, in...
-
Massimo Valerii eletto alla guida di Anie CSI
Anie CSI, l’Associazione di Federazione Anie che rappresenta l’industria dei Componenti e Sistemi per Impianti, ha eletto...



Mercato Tutti ▶
-
 Avio Solution annuncia la trasformazione in Spa e la nomina di Pontecorvo a presidente
Avio Solution annuncia la trasformazione in Spa e la nomina di Pontecorvo a presidenteAvio Solution ha annunciato di aver completato ufficialmente la trasformazione in Società per Azioni...
-
 Da Brady stampante di etichette senza cavi
Da Brady stampante di etichette senza caviBrady Corporation, specialista nell’identificazione automatica e nell’acquisizione di dati, presenta un nuovo tipo di...
-
 Bonomi nominato alla presidenza di Ceir per l’industria europea delle valvole e rubinetteria
Bonomi nominato alla presidenza di Ceir per l’industria europea delle valvole e rubinetteriaSandro Bonomi, già presidente di AVR – Associazione italiana costruttori valvole e rubinetteria, è...
Tecnologie Tutti ▶
-
 Valvola a spola Danfoss compatta e modulare per macchinari mobili
Valvola a spola Danfoss compatta e modulare per macchinari mobiliDanfoss Power Solutions annuncia il lancio della valvola a spola CVG 8 nei mercati...
-
 Tecnologia a ultrasuoni nei controlli non distruttivi da Xarion Laser Acoustics
Tecnologia a ultrasuoni nei controlli non distruttivi da Xarion Laser AcousticsXarion Laser Acoustics presenta alla ECNDT 2026, il principale appuntamento europeo dedicato ai controlli...
-
 Secondo loop di controllo nelle valvole ad azionamento diretto Parker
Secondo loop di controllo nelle valvole ad azionamento diretto ParkerParker Hannifin, protagonista mondiale nelle tecnologie di movimentazione e controllo, lancia DFplus Gen IV,...


{kind=link}